There are 3 different types of motion tasks which can be
used at the Servostar:
1) A 'normal' trapezoidal motion task.
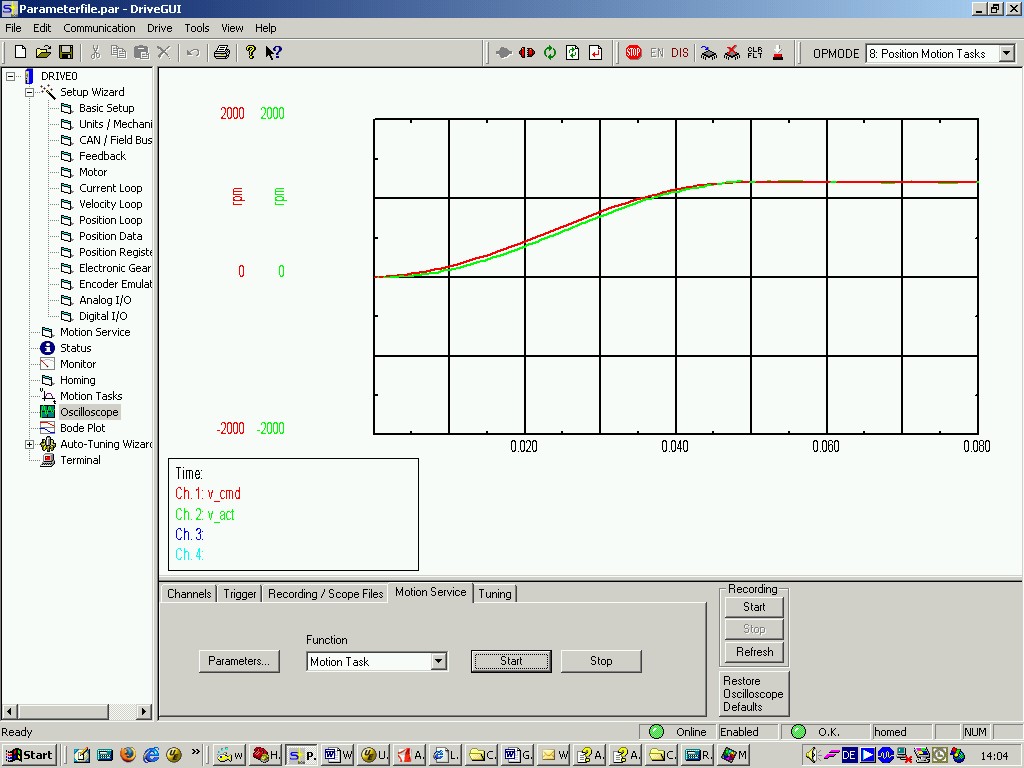
2) A 1:1 Lookup-Table motion task (please note
attachment lookup 1.jpg).
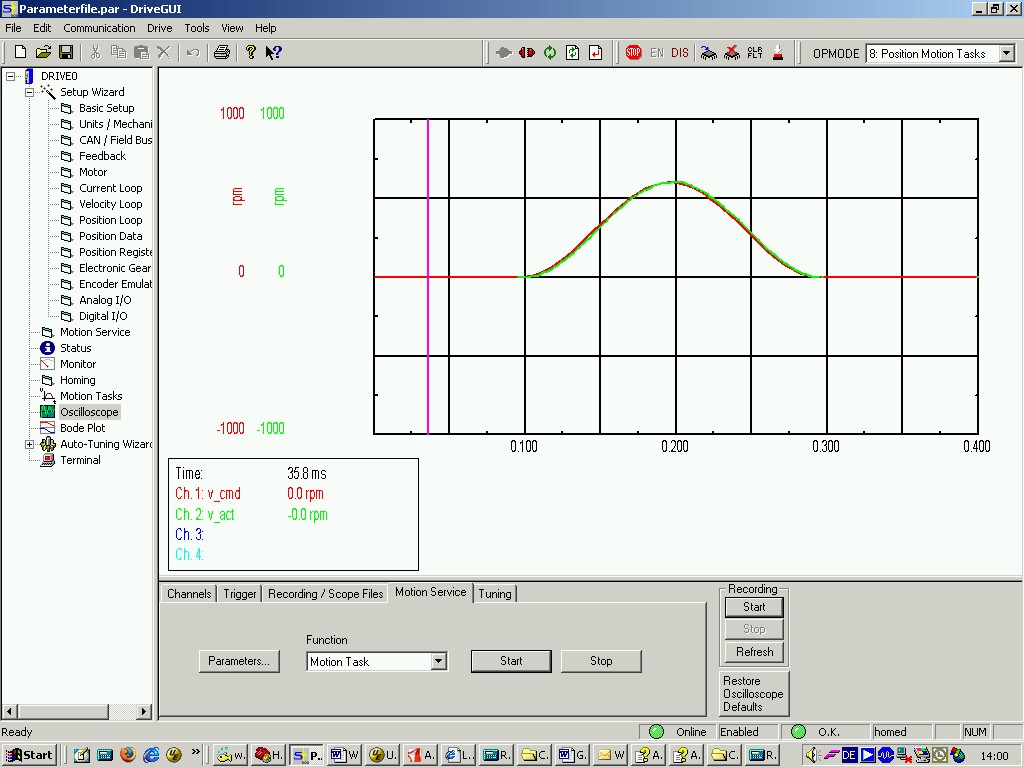
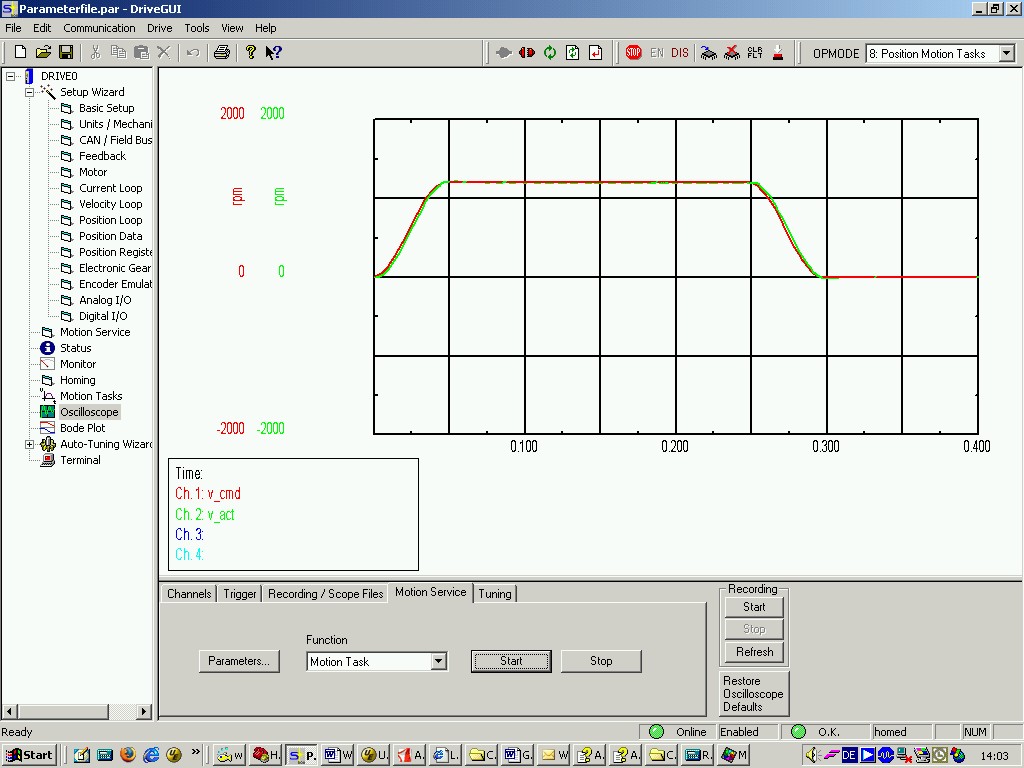
3) A motion task with a sin2-acceleration ramp (please note
attachment lookup 2.jpg and lookup 3.jpg).
Point 2:
If you want to use a 1:1 Lookup-Table motion task (motion
task without a constant speed between the acceleration and deceleration ramp)
you have to set Bit 9 of O_C to 1. This applies for the SR600 and S300. The
Servostar try to reach the target position (O_P) within the defined time
(O_ACC1+O_DEC1 at the SR600, O_ACC+O_DEC at the S300). The maximum velocity
that will be reached depends on the parameter O_P and O_ACC1+O_DEC1
(SR600).
The paremeter O_ACC2 (SR600) or O_TAB (S300) decides which
Lookup-Table is used. The Servostar has 2 Lookup-Tables stored in the Flash,
Table 0 and 1.
The parameter O_V has no meaning.
Point 3:
If you want to use a motion task with a sin2-acceleration
ramp (motion task with a constant speed between the acceleration and
deceleration ramp), you must set bit 9 of O_C to 0. This applies for the SR600
and S300. Now there is a difference between the SR600 and S300:
The S300 only uses the Lookup-Table which is stored in our
internal flash to generate a sin2-ramp. Therefore you have to set bit 16 of O_C
to 1. At the S300 O_C is a 32 bit variable. O_TAB decides which Lookup-Table is
used.
The S600 can use the Lookup-Table which is stored in our
internal flash to generate a sin2-ramp or can calculate the sin2-ramp by an
algorithm (please refer also ASCII command SPSET). If you use the Lookup-Table
to generate a sin2-ramp (SPSET=3), ACC2 decides which table is used for the
sin2-ramp. At the S600 O_C is only a 16 bit variable.
Point 2 and Point 3:
The command O_DEC2 has no functionality in conjunction with
sin2-motion tasks.
The following parameters have the same functionality at sin2
motion tasks:
S600
--------------
O_ACC1
O_DEC1
O_ACC2
{kind=link}
{kind=link}
{kind=link}