| Feedback |
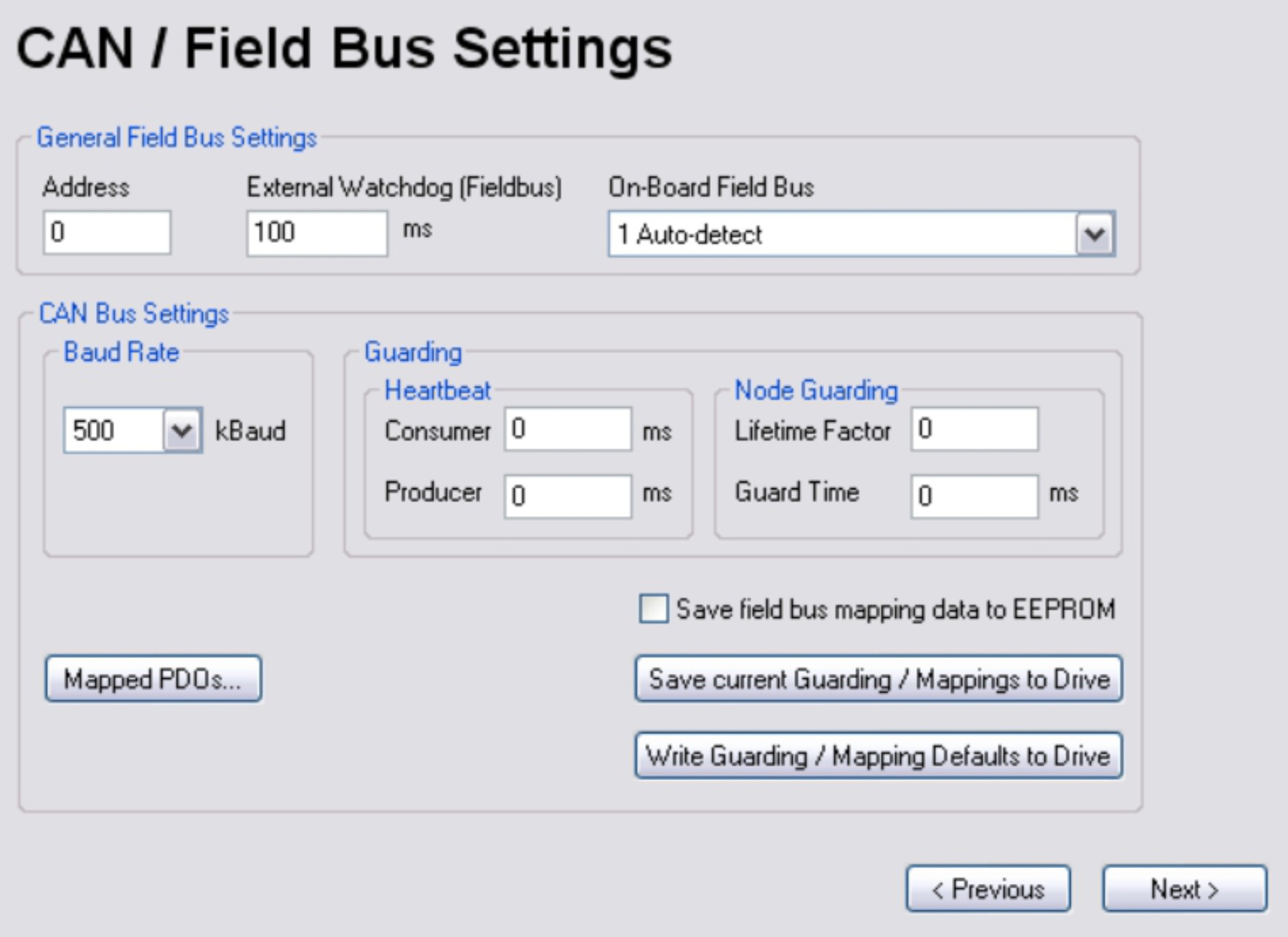
Station address and baud rate in the fieldbus network is customized here.
|
Screen text |
ASCII Parameter |
|---|---|
|
Address |
|
|
External Watchdog (Fieldbus) |
|
|
CAN-Bus Settings |
|
|
Baud Rate |
|
|
Heartbeat Guard: Consumer CANopen Objekt 1016h sub1 |
|
|
Heartbeat Guard: Producer CANopen Objekt 1017h sub0 |
|
|
Node Guarding: Lifetime factor CANopen Objekt 100Dh sub0 |
|
|
Node Guarding: Guard Time CANopen Objekt 100Ch sub0 |
|
|
Save fieldbus mapping data to EEPROM |
Save current Guarding/Mappings to Drive (CCSAVE)
The set communication parameters are saved to the servo amplifier.
Write Guarding/Mapping Defaults to Drive (CCSAVE)
The CANopen communication parameters are reset to the default values. These values are active after rebooting the servo amplifier (COLDSTART).
Heartbeat
The Heartbeat Protocol defines an Error Control Service without need for remote frames. A Heartbeat Producer transmits a Heartbeat message cyclically. One or more Heartbeat Consumer receive the indication. The Heartbeat Consumer guards the reception of the Heartbeat within the Heartbeat Consumer Time. If the Heartbeat is not received within the Heartbeat Consumer Time a Heartbeat Event will be generated. The consumer heartbeat time defines the expected heartbeat cycle time and has to be higher than the corresponding producer heartbeat time configured on the device producing this heartbeat. If the consumer heartbeat time is 0 the corresponding entry is not used. The time is defined in milliseconds.
Nodeguard
The Node Guarding protocol is a functional monitoring for the drive. It requires that the drive is accessed at regular intervals by the CANopen master. The product of Guard Time and Life Time Factor gives the life time for the nodeguarding protocol. If one of these values set to zero, then the response monitoring is inactive. If the drive is not accessed within the response monitoring time, then Warning n04 appears on the drive
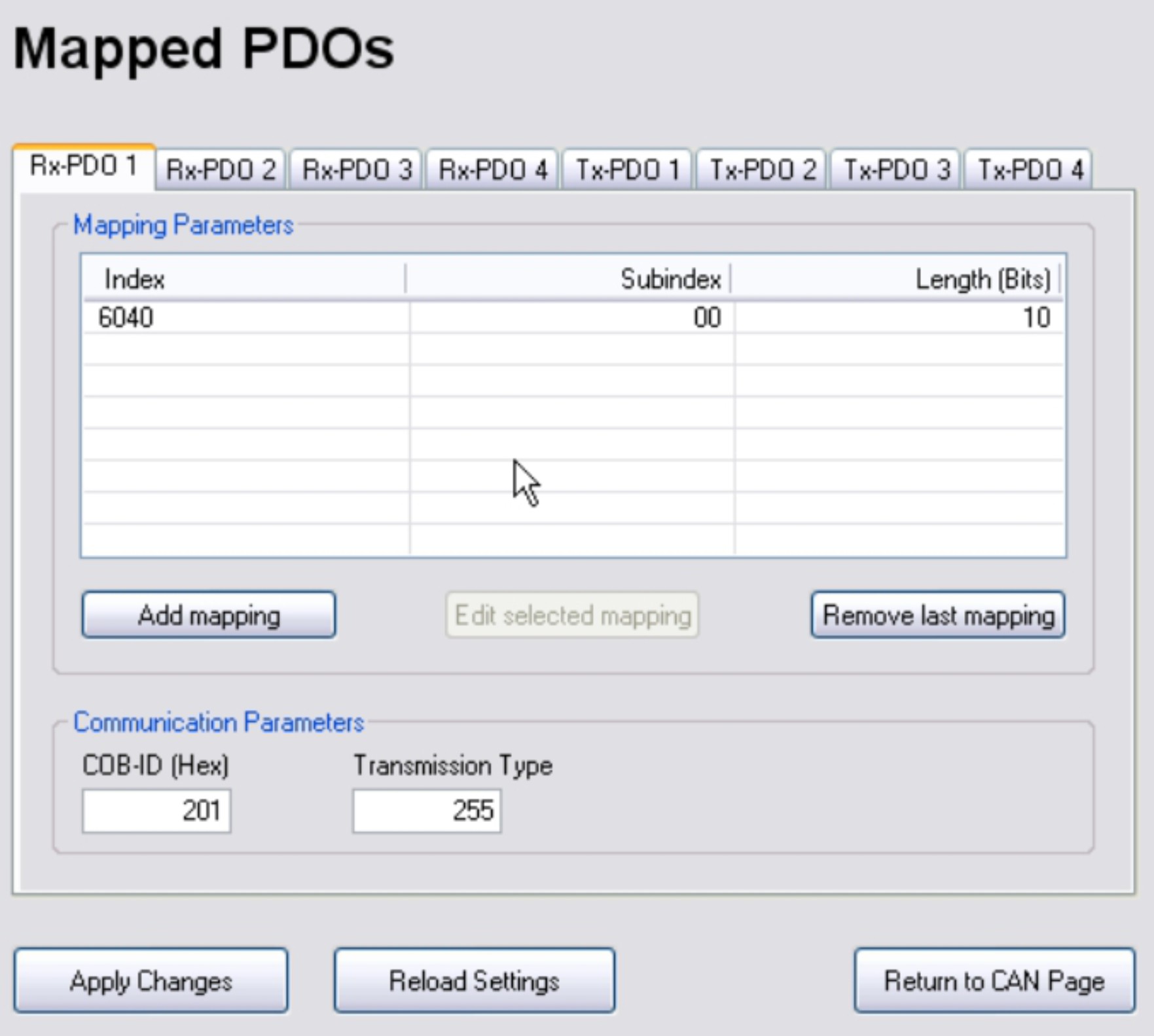
Click the button "Mapped PDOs..."
There are distinguished two types of PDOs: Receive PDOs (RxPDOs) and transmit PDOs (TxPDOs).
The content of the PDOs is pre-defined. If the data content is not appropriate for a special application the data objects in the PDOs can be remapped freely. Select the required PDO with the corresponding register tab.
Further information on PDO Mapping can be found in the CANopen Manual.
Adding or editing opens an additional edit window:
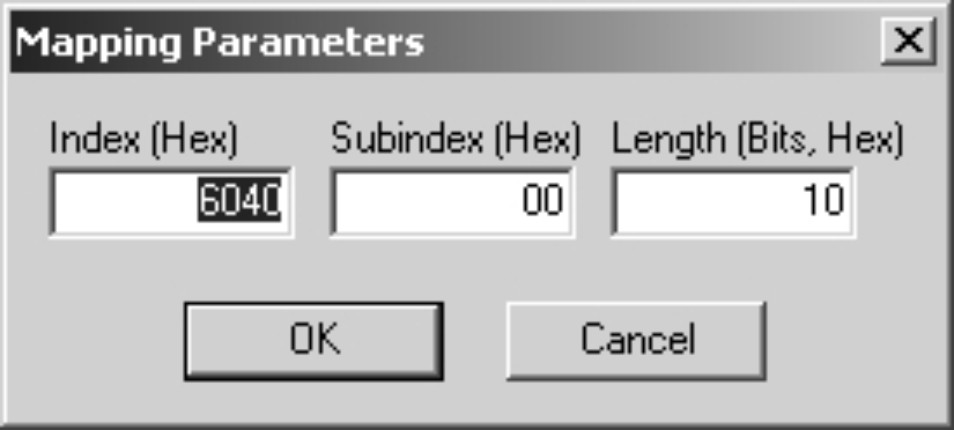
A table with all available mapping parameters can be found in the CANopen Manual. You can adjust important communication parameters for the data transmission:
|
Screen text |
ASCII Parameter |
|---|---|
|
COB-ID |
|
|
Transmission Type |
|
|
Inhibit Time (with TxPDOs only) |
|
|
Event Time (with TxPDOs only) |
Apply Changes
The changed mappings are transmitted to the servo amplifier. Now the data will be checked.
Reload Settings
Communication parameters are reloaded from the servo amplifier.
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|
