| Feedback |
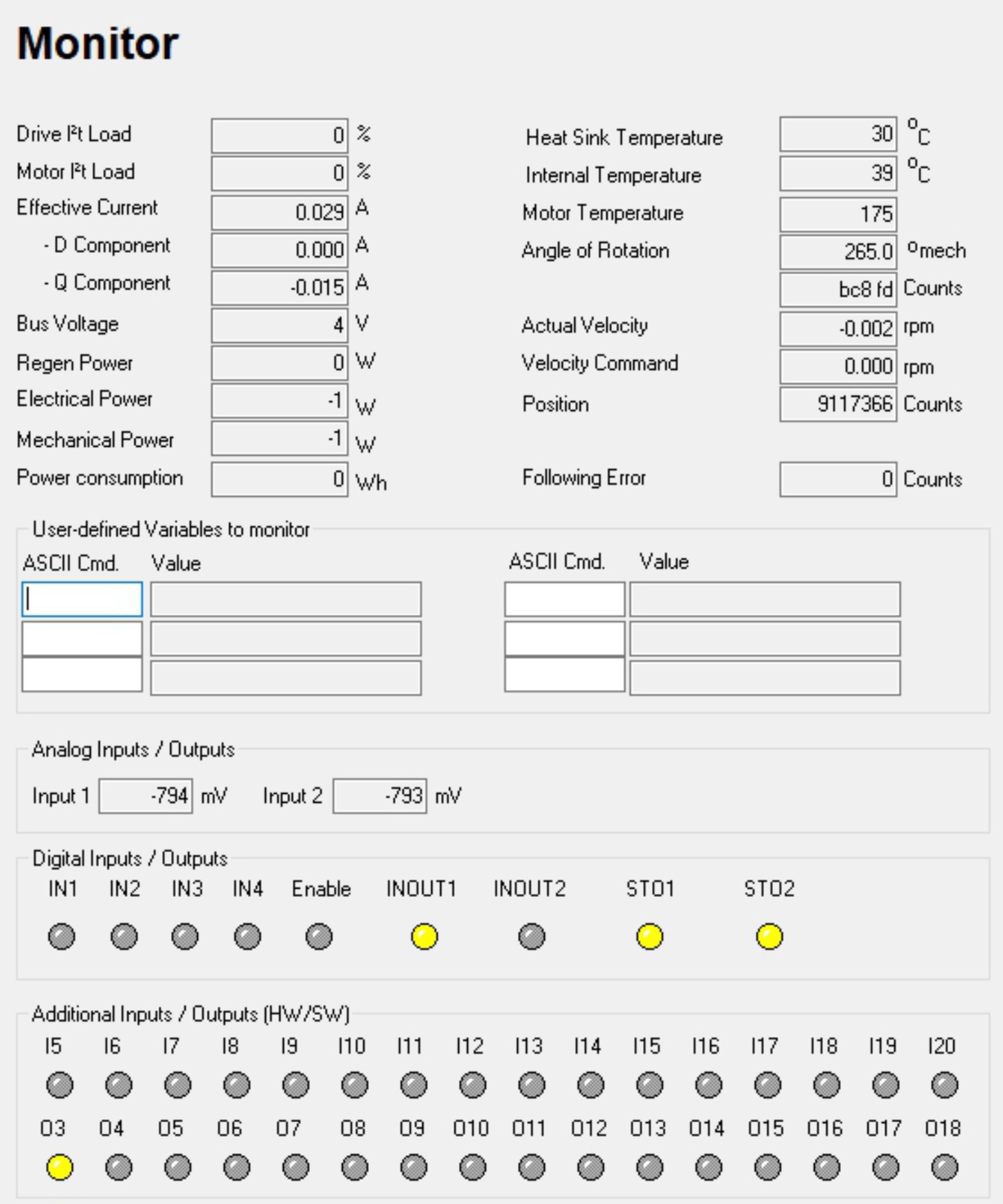
All important parameters are displayed.
Additionally, you can see the value of 3 parameters. Fill in the ASCII names of the parameters of macro variables (with leading M) you want to see.
|
Drive-I²t-Load |
The actual effective load is shown as % of the preset amplifier's effective current Irms. |
|
Motor-I²t-Load |
The actual effective load is shown as % of the preset motor's standstill current Io. |
|
Effective Current |
This shows the value (in A) of the actual current indication (r.m.s. value, always positive). |
|
D Component |
Shows the value (in A) of the current D-component (Id, reactive current) of the current indication. |
|
Q Component |
Shows the value (in A) of the current Q-component (Iq, active current) of the current indication. The sign that is displayed is negative in regenerative operation (motor under braking). |
|
Bus Voltage |
The DC-link (DC-bus) voltage produced by the amplifier is shown in V. |
|
Regen Power |
The mean value (calculated during 30s) of the regenerative power is shown in W. |
|
Electrical Power |
Current electrical power at the motor terminals P |
|
Mechanical Power |
Current mechanical power et the motor shaft PMECH |
|
Power consumption |
Current electrical power consumption |
|
Heat Sink Temperature |
The temperature of the heat sink in the servo amplifier is shown in °C. |
|
Internal Temperature |
The temperature inside the servo amplifier is shown in °C. |
|
Motor Thermistor Resistance |
The actual resistance in ohms is shown, if a PTC resistor is used in the motor winding. The value can be used to calculate the actual motor winding temperature. If a thermo switch is used, absolute temperature cannot be evaluated. |
|
Angle of Rotation |
Displays the actual angle of rotation of the rotor in "°mech" or in "counts" referred to the mechanical zero point of the measuring system. Indicated is the absolute position within one turn of the motor axis. The dimension "counts" is a hexadecimal number with 20 bits accuracy (that means : 1 turn = 220-1 counts) |
|
Actual Velocity |
Displays the actual rotational speed of the motor in rpm. |
|
Velocity Command |
Displays the currently set speed in rpm. |
|
Position |
Shows the momentary position in user units. |
|
Following Error |
Shows the momentary following error in user units. |
|
User-defined Variables to monitor |
You can see the value of 3 parameters. Fill in the ASCII names of the parameters you want to see. |
|
Analog Inputs |
Displays the actual voltages (in mV) at the setpoint inputs. |
|
Analog Outputs |
Displays the actual voltages (in mV) at the analog outputs. Visible only with installed expansion card |
|
Digital Inputs/Outputs |
Displays the actual voltages (in mV) at the setpoint inputs. |
|
Additional Inputs/Outputs |
The conditions of inputs 5-20 and outputs 3-18 are displayed. Depending on the existing hardware configuration, these I/O's are assigned to either the I/O expansion card or the virtual software I/O's (for assignment see additional digital Inputs / Outputs). |
Usable Macro Variables (selection, insert with leading M to the input field):
|
Makro Variable (selection) |
Short Description |
|---|---|
|
ERRCODE |
Error state variable (see ERRCODE) |
|
STATCODE |
Drive state variable (see STATCODE) |
|
TRJSTAT |
Trajectory state variable (see TRJSTAT) |
|
ADVAL0…15 |
Analog input values |
|
ADVAL0 |
Cosine resolver |
|
ADVAL1 |
Sine Resolver |
|
ADVAL2 |
Motor current Ia |
|
ADVAL3 |
Motor current Ib |
|
ADVAL4 |
Sine Encoder |
|
ADVAL5 |
Cosine Encoder |
|
ADVAL6 |
Analog setpoint 1 |
|
ADVAL7 |
Analog setpoint 2 |
|
ADVAL8 |
Motor temperature |
|
ADVAL9 |
Heatsink temperature |
|
ADVAL10 |
Environments temperature |
|
ADVAL11 |
Sense voltage encoder |
|
ADVAL12 |
n.c. |
|
ADVAL13 |
DC bus link voltage |
|
ADVAL14 |
n.c. |
|
ADVAL15 |
n.c. |
|
SIENC |
Normalised sine encoder +/- 1350 <> 1Vss |
|
COENC |
Normalised cosine encoder +/- 1350 <> 1Vss |
|
SR_RXDE |
Zero pulse port for NREF = 5 |
|
SR_HALL |
Hall segments port |
|
PFBL |
Position Feedback 64 Bit size. The lower 32 bits includes the position within a revolution, the upper 32 bits counts the number of revolutions. |
|
S_SETL |
Position setpoint 64 Bit size. The lower 32 bits includes the position within a revolution, the upper 32 bits counts the number of revolutions. |
|
PFB |
Position Feed back(PRBASE size) |
|
S_SET |
Position setpoint (PRBASE size) |
|
S_SETH |
Sercos position setpoint (1 Revolution = 2^20) |
|
PTARGET |
Target position for the last/current motion task (PRBASE size) |
|
PSPEED |
Actual velocity setpoint in counts/250µsec |
|
PSPEEDMS |
Actual velocity setpoint in counts/250µsec for master/slave trajectory |
|
PSPEED3 |
Actual velocity setpoint for internal motion task trajectory |
|
PENDSPEED |
End velocity setpoint for the actual motion task |
|
MOVEP_NR |
Number of the last/actual motion task |
|
NIZFLAG |
State of the external zero pulse |
|
PSTOP |
State of the PSTOP limit switch |
|
NSTOP |
State of the NSTOP limit switch |
|
INPUT1…20 |
State of the hardware/software input 1…20 |
|
OUTPUT1...18 |
State of the hardware/software output 1..18 |
|
HARDENA |
State of the hardware enable |
|
EN_P_I |
State of the power stage (1=enabled, 0=disabled) |
|
NET_BTBI |
State of the net BTB |
|
ENABLE_I |
State of the internal enable signal |
|
SOFTENABLE |
State of the software enable |
|
EN_BRAKE_I |
Brake state (1=open, 0=closed) |
|
PRD |
Feedback position inside one revolution |
|
IVORCMD |
Current feed forward (3280 = DIPEAK) |
|
PBAL |
Regenerative power actual value |
|
SR5VINCR |
Pulse counter for X5 Master / Slave (5V) |
|
SR24VINCR |
Pulse counter for X3 Master / Slave (24V) |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|
