| Feedback |
Available with "Quick Motor/Drive Setup" only. Simplified setting of the motor related parameters. The quick setup of the parameters makes the tuning of the motor/amplifier combination in the application much easier. Special motors must be defined with the during the "Complete Setup" with Custom Motor Parameters on the screen "Motor".
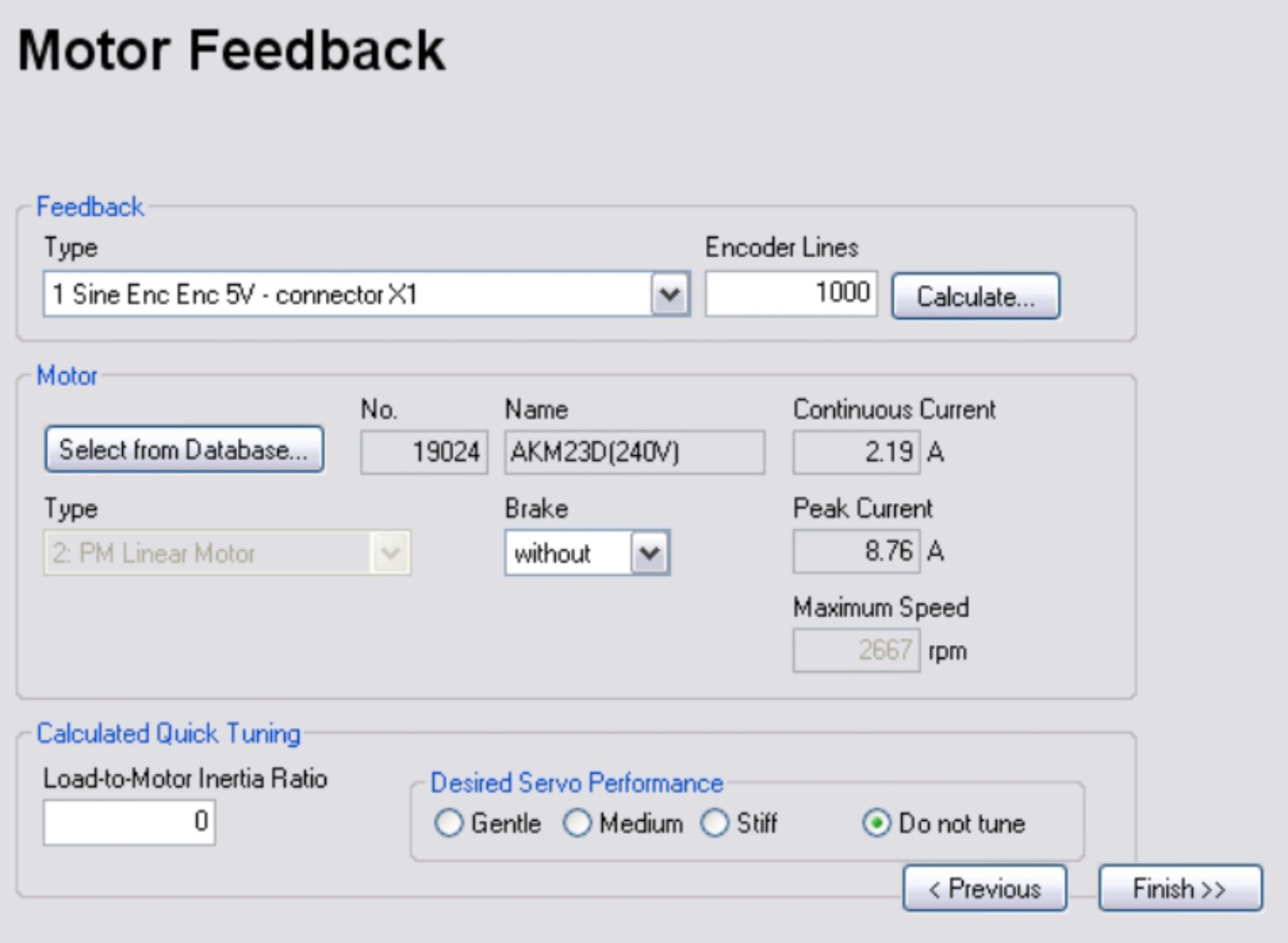
Depending on the selection of rotary or linear motor the screen looks different.
|
|
Resolver is fixed to 2 pole in the Quick Motor/Drive Setup. Change "pole n°" on feedback screen in Complete Setup later, if required. |
|
Screen text |
ASCII Parameter |
|---|---|
|
Feedback Type |
|
|
Encoder Lines |
ENCLINES (with encoder feedback only) |
|
Motor: Select from Database... |
Click the button "Select from Database...". Open the database file (mdb_ _ _.csv) and select the used motor out of the list. |
|
Brake |
|
|
Calculated Quick Tuning |
If you know the Load-to-motor inertia ratio, enter the number and select the desired servo performance. If you don't know the inertia ratio, select "Do not tune". |
|
Load-to-Motor Inertia Ratio |
This value is the basis for calculating the velocity loop gain parameter. |
|
Desired Servo Performance |
This category is used for calculating some parameters of the current loop. |
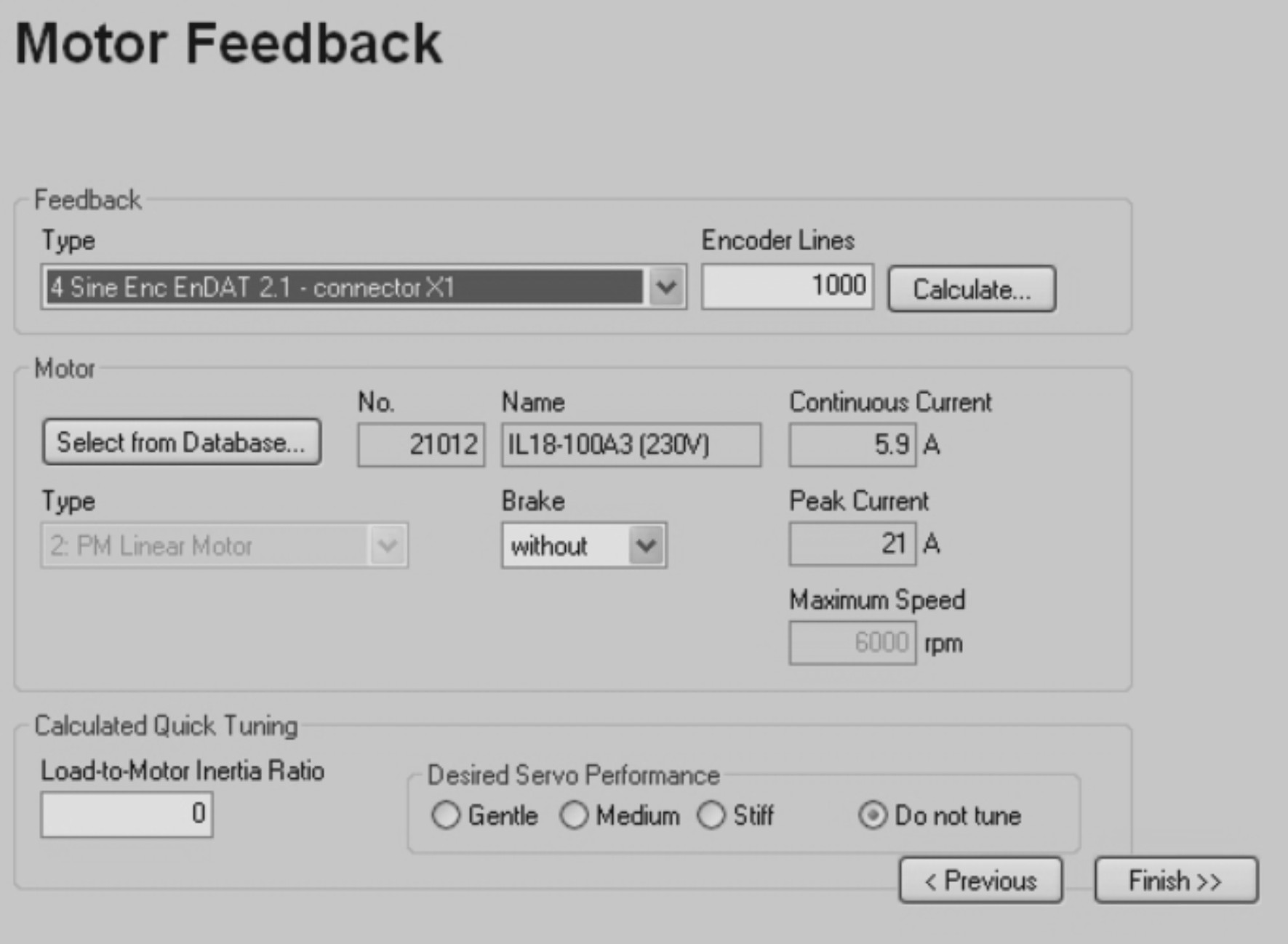
If you select a linear motor, the screen changes.
|
Screen text |
ASCII Parameter |
|---|---|
|
Feedback Type |
|
|
Encoder Lines |
ENCLINES (with encoder feedback only). Click Calculate for calculating the encoder lines. |
|
Motor: Select from Database... |
Click the button "Select from Database...". Open the database file (mdb_ _ _.csv) and select the used motor out of the list. |
|
Brake |
|
|
Calculated Quick Tuning |
If you know the Load-to-motor inertia ratio, enter the number and select the desired servo performance. If you don't know the inertia ratio, select "Do not tune". |
|
Load-to-Motor Inertia Ratio |
This value is the basis for calculating the velocity loop gain parameter. |
|
Desired Servo Performance |
This category is used for calculating some parameters of the current loop. |
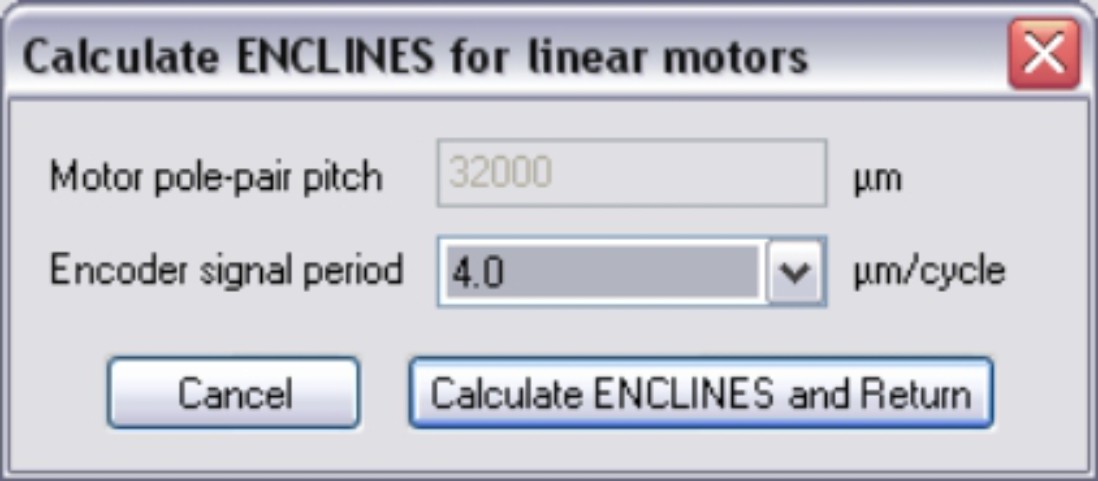
Fill in the Encoder signal period and click "Calculate ENCLINES....". The calculated value is used for ASCII parameter ENCLINES .
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|

