|
|
Automatic Start! |

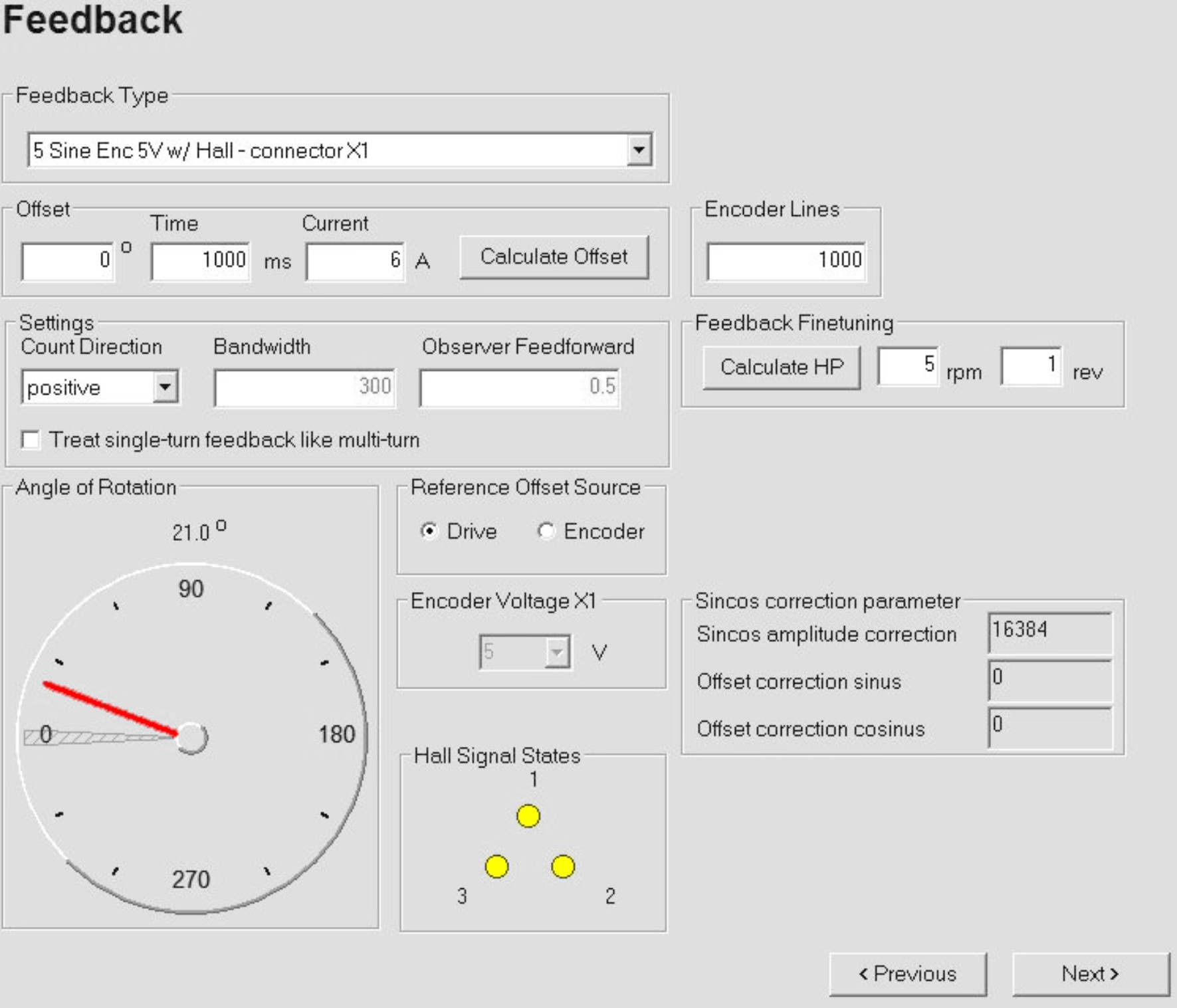
An incorrect setting can cause the motor to run away, even with a speed setpoint n=0 ! Risk of injury due to uncontrolled motion of the load. Make sure you set the feedback system installed in your motor. Check the rating plate of the motor and the type code.