| Feedback |
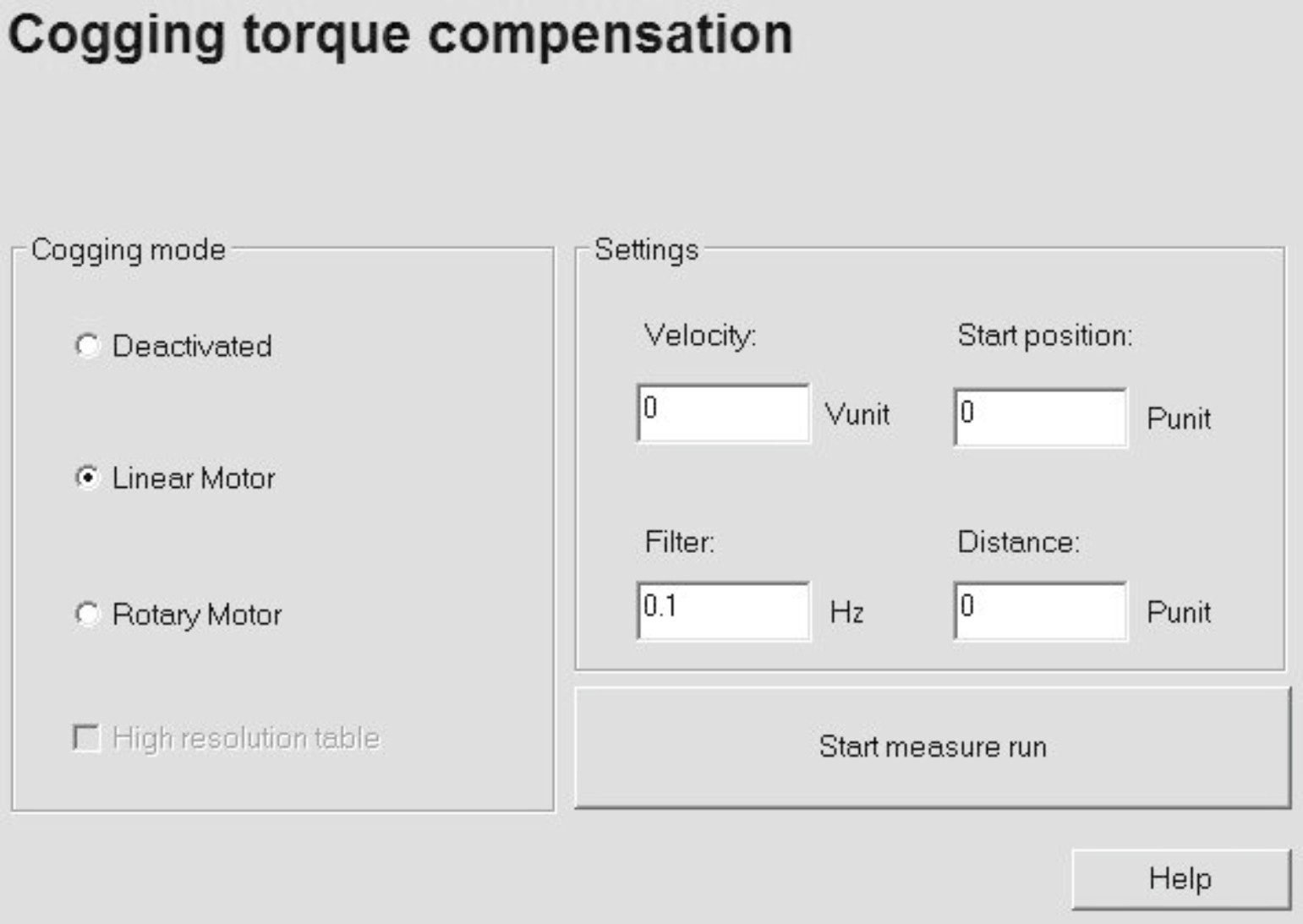
This function generates a table with current feed-forward values for cogging (torque) compensation, and activates this compensation. A distinction is made between linear and rotary motors in the case of this setting.
Prerequisite:
A reference point must be set (Homing). To ensure correct operation, you must check that the reference point is always at the same position it was in while the current feed-forward table was being created.
First select the cogging mode (drive type) and then enter the values for the measurement run.
|
|
The load will move during the measurement run. Ensure that the travel path is unobstructed and secured. The axis will remain enabled after the measurement run. |
Click on the “Start Measurement Run” button to start the measurement run.
You can find detailed information about the process on the KDN page Cogging Suppression.
|
Screen text |
ASCII Parameter |
|---|---|
|
Deactivated |
|
|
Linear Motor |
COGMODE (256 points) |
|
Rotary Motor |
COGMODE (256 points) |
|
High resolution table |
COGMODE (4096 points) |
|
Velocity |
|
|
Filter |
|
|
Start position |
|
|
Distance |
|
|
Help |
Starts KDN page Cogging Suppression. |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|

