| Feedback |
Homing (reference traverse) is an absolute task that is used to zero the drive for subsequent positioning operations. You can choose between various types of homing.
After homing, the drive reports "InPosition" and then enables the position controller in the servo amplifier.
The limit switch functions: 2, PSTOP and 3, NSTOP must be activated for digital inputs 3 or 4 to achieve full homing functionality.
|
|
Be sure that the zero point of the machine (reference point) is in a position that allows the subsequent positioning operations. The software limit-switches that were set as parameters may be ineffective. The axis could move to the hardware limit-switch or even the mechanical stop. There is a risk of damage. |
|
|
If the reference point (machine zero point) is approached at high inertia with excessive velocity, it can be run over and the axis moves in the worst case up to the hardware limit-switch or the mechanical stop. There is a risk of damage. |
|
|
Without homing the position controller can not be operated with internal motion tasks. After switching on the 24V auxiliary voltage, homing must be performed. During homing the start signal must not be taken away. The start signal must remain present until the “InPosition” message appears. |
|
|
When homing is started, then the SW Enable is set automatically. Homing is started in OPMODE 8 only, but the SW Enable is set in all . Therefore the drive accelerates depending on a given analog setpoint, if the START command is executed in OPMODE 1 or OPMODE 3 . |
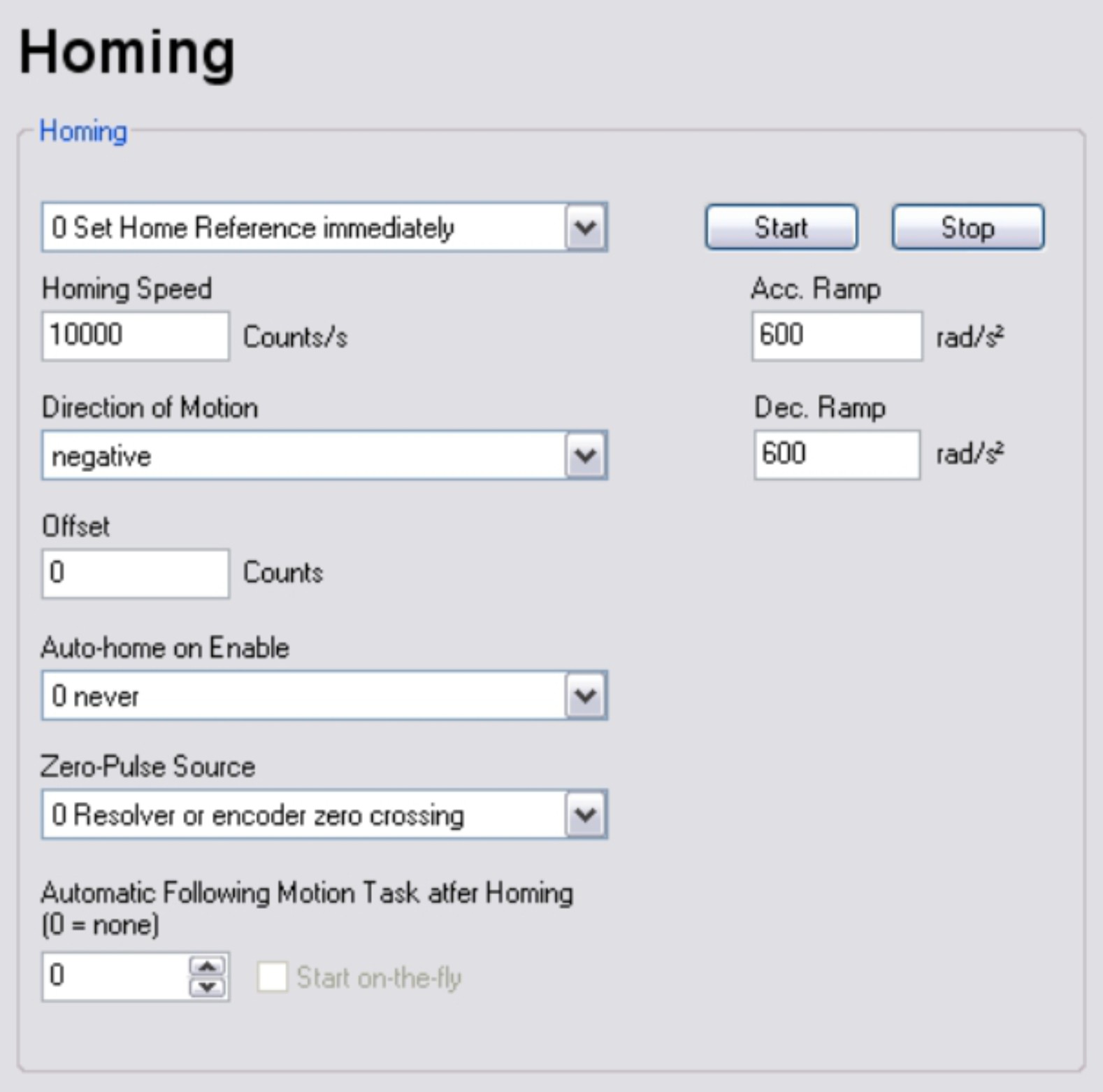
Homing Type (NREF)
You can choose which type of homing should be performed.
|
No |
Function |
Reference point is set to |
|---|---|---|
|
0 |
Set Home Reference immediately |
the setpoint position |
|
1 |
Home Switch and Zero Pulse |
the first feedback zero-mark outside the home switch |
|
2 |
Limit Switch and Zero Pulse |
the first feedback zero-mark outside the limit switch |
|
3 |
Home Switch without Zero Pulse |
the edge of the home switch |
|
4 |
Limit Switch without Zero Pulse |
the edge of the limit switch |
|
5 |
within one Revolution and Zero Puls |
the next feedback zero-mark |
|
6 |
Set Ref.Point immediately on Position Command |
the actual position |
|
7 |
Move to Mechanical Stop (Ref. Ipeak) and Zero Pulse |
the first feedback zero-mark outside the mechanical stop. Peak current is limited to Homing Ipeak during the movement. (see screen page "Current Loop"). |
|
8 |
Move to an absolute SSI-Position |
the read position from the SSI input at the beginning of the homing |
|
9 |
Move to Mechanical Stop (Ref. Ipeak) without Zero Pulse |
the actual position, when the drive is at the mechanical stop and the following error reachs 50% of the max. allowable following error. Peak current is limited to Homing Ipeak during the movement. (see screen page "Current Loop"). |
Homing Speed (VREF)
Speed for the homing operation. The sign is automatically fixed by the selected direction of motion.
Acc. Ramp (ACCR)
Acceleration ramp for homing operation. This ramp is also valid for jog mode.
Dec. Ramp (DECR)
Deceleration ramp for the homing operation. This ramp is also valid for jog mode. This deceleration ramp is only used if the operating mode allows it. For homing to a hardware limit-switch, the emergency ramp is used.
Direction of Motion (DREF)
Determines the direction of motion for homing. The setting "distance-dependent" is only relevant for Homing 5 (within one turn). In this case, the direction is chosen to give the shortest distance to the zero-mark. This parameter also defines the direction of motion for a Modulo type of axis
Offset (ROFFS)
With the reference offset you can assign an absolute position value other than 0 to the reference point. With an offset for the reference position, you are not actually making a physical change, but the offset is used as a reference value within the position control of the servo amplifier. Homing to the reference switch does not finish at zero, but at the preset reference offset value.
|
|
The reference offset must be set before homing is started. |
Auto-home on Enable (AUTOHOME)
The selected homing is started automatically after the servo amplifier has been enabled.
Zero Pulse Source (REFMODE)
Select the zero pulse source for the homing here.
Automatic Following Motion Task after Homing (NREFMT)
When the homing is done, the selected motion task is started automatically. Setting of "0" disables this function.
Start on the fly (NREFMT)
The motion task starts immediately. The bits “homing active=0“ and ”homing finnished=1“ are set after the motion task is finished.
Sets the reference point to the setpoint position (the following error is lost). The load does not move.
|
|
Before starting homing, check the safety of the system since the load may move even if the limit-switches are disconnected or defective. |
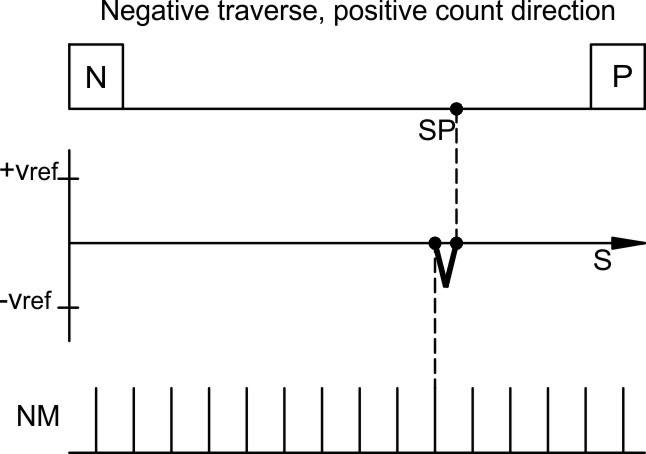
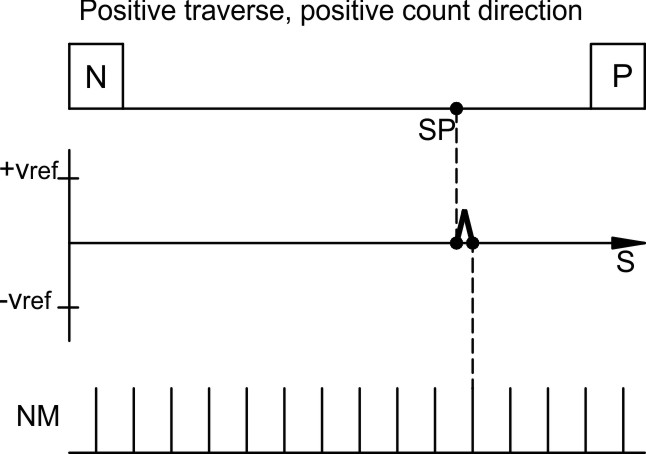
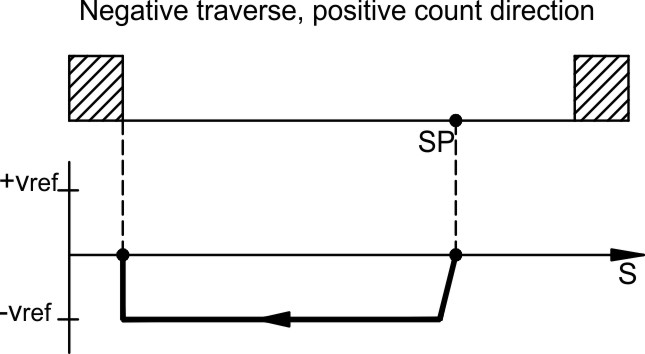
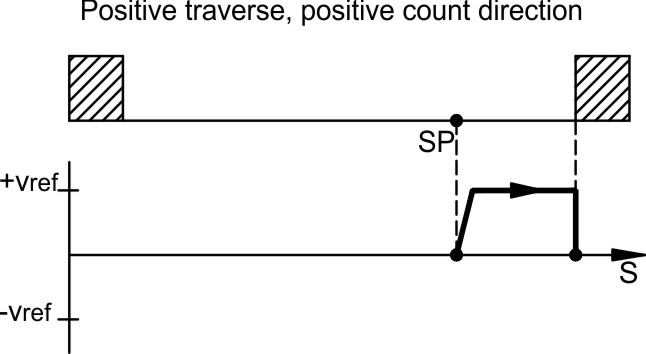
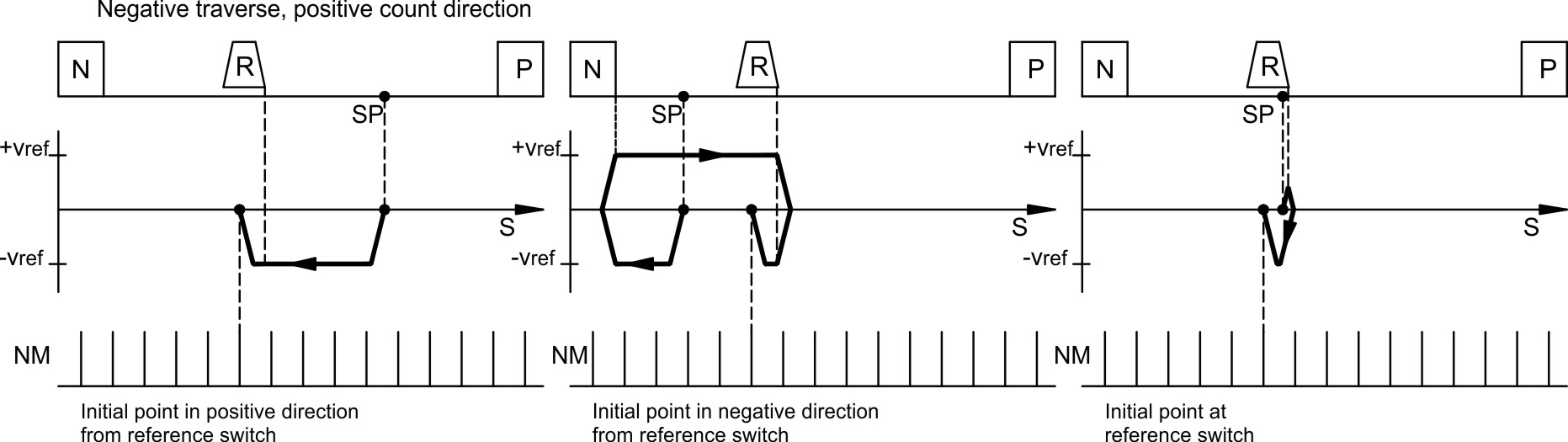
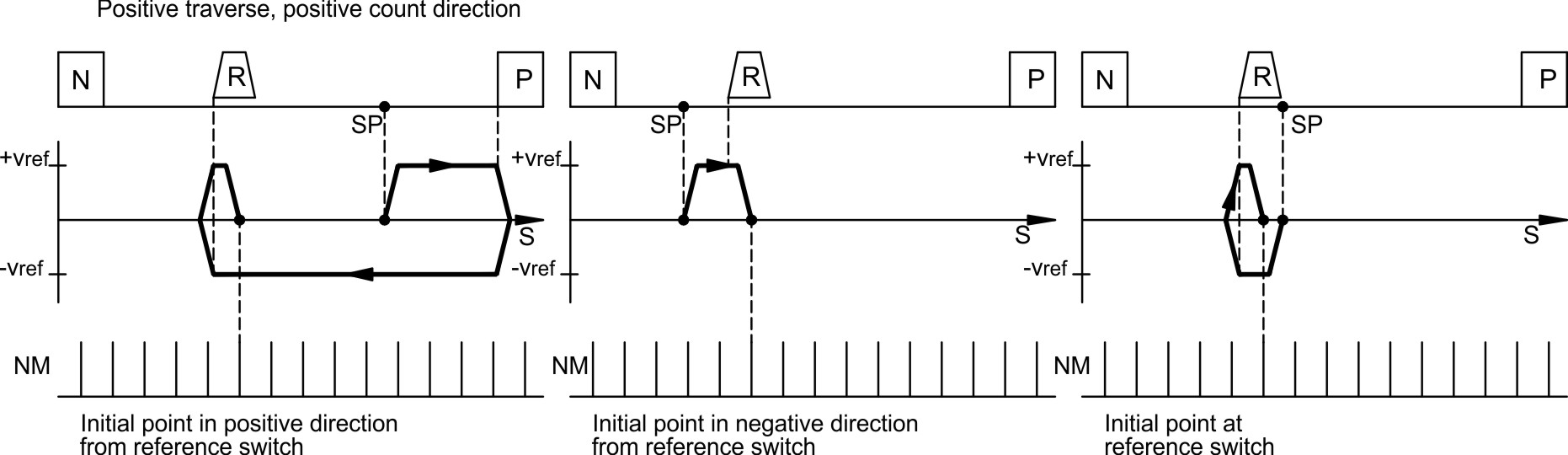
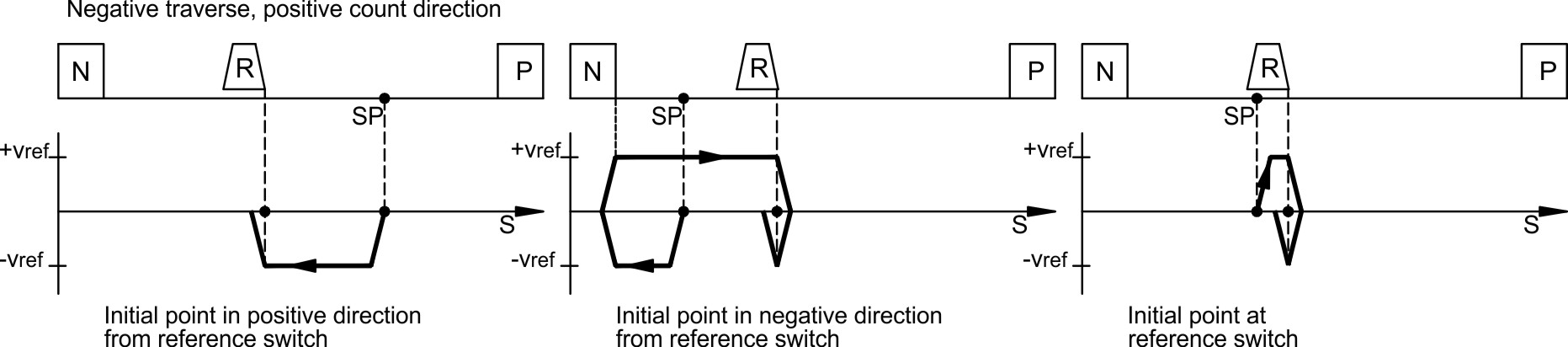
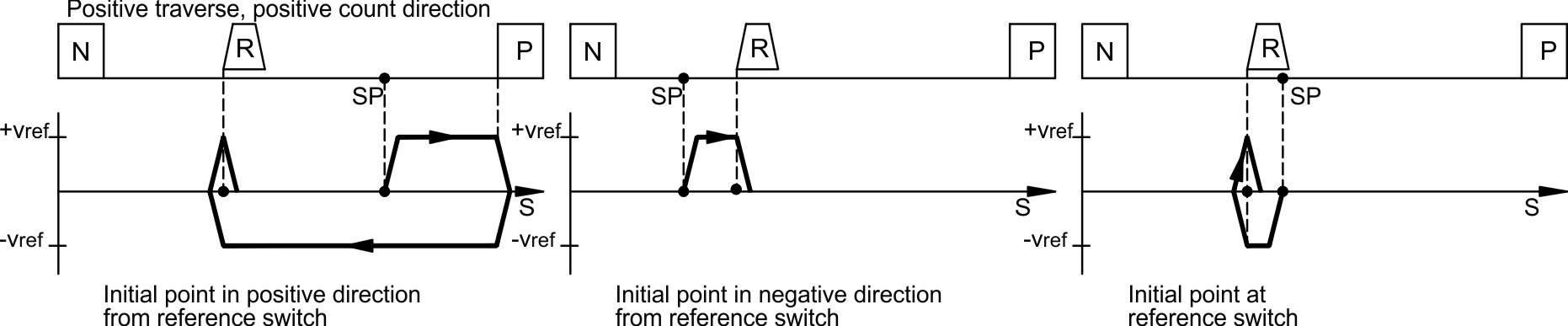
Homing without limit switches, with homing switch, with feedback zero
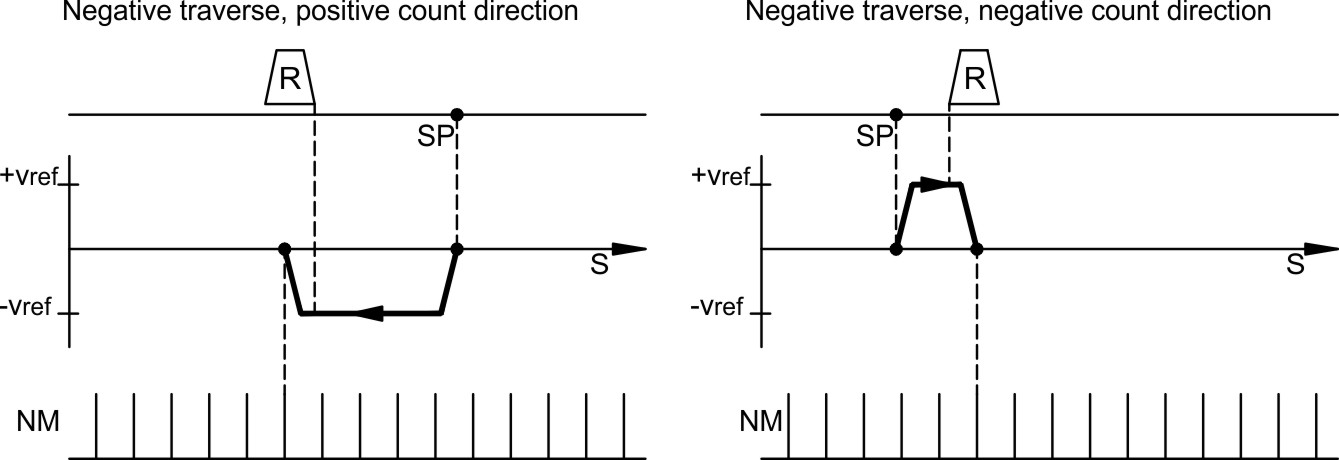
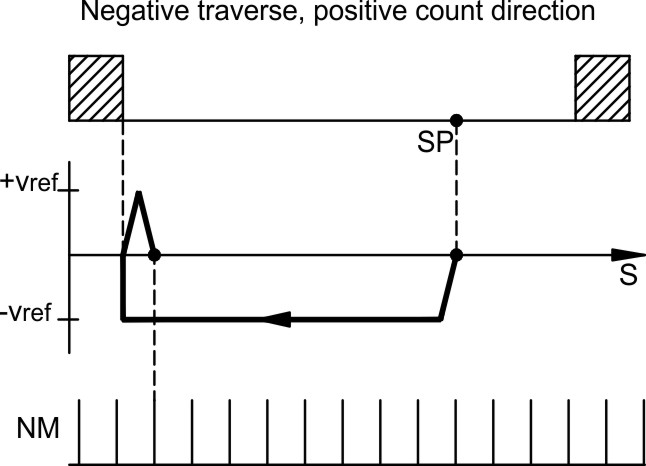
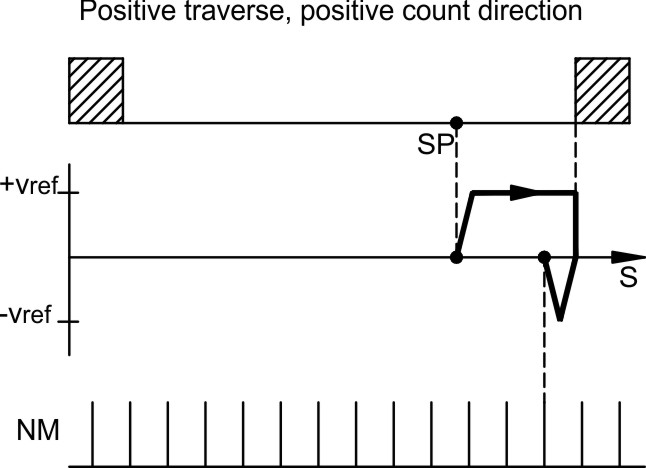
Homing with limit switches, with homing switch, with feedback zero
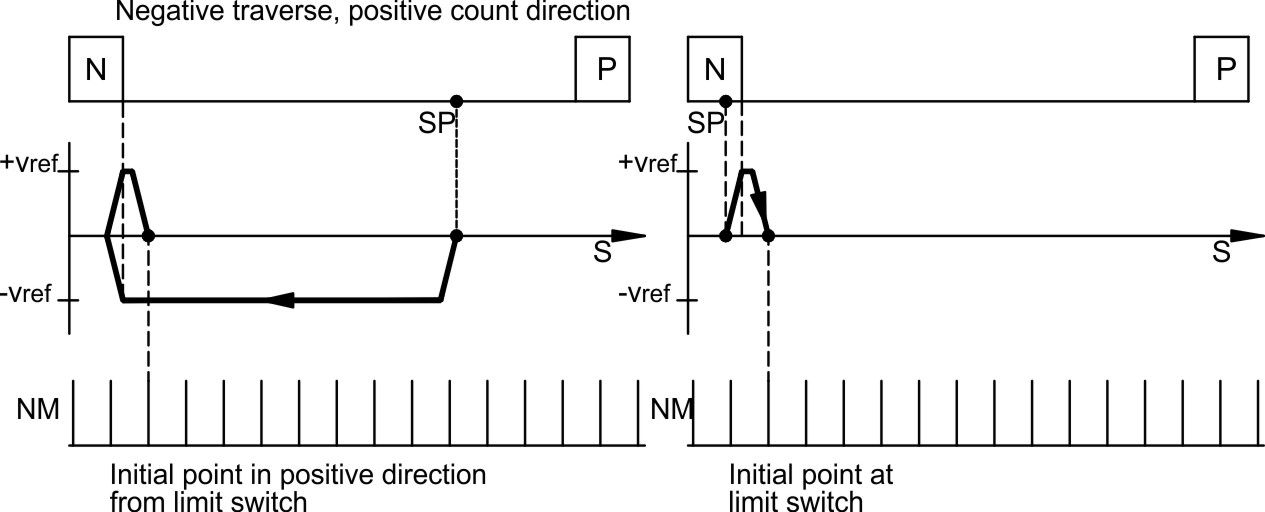
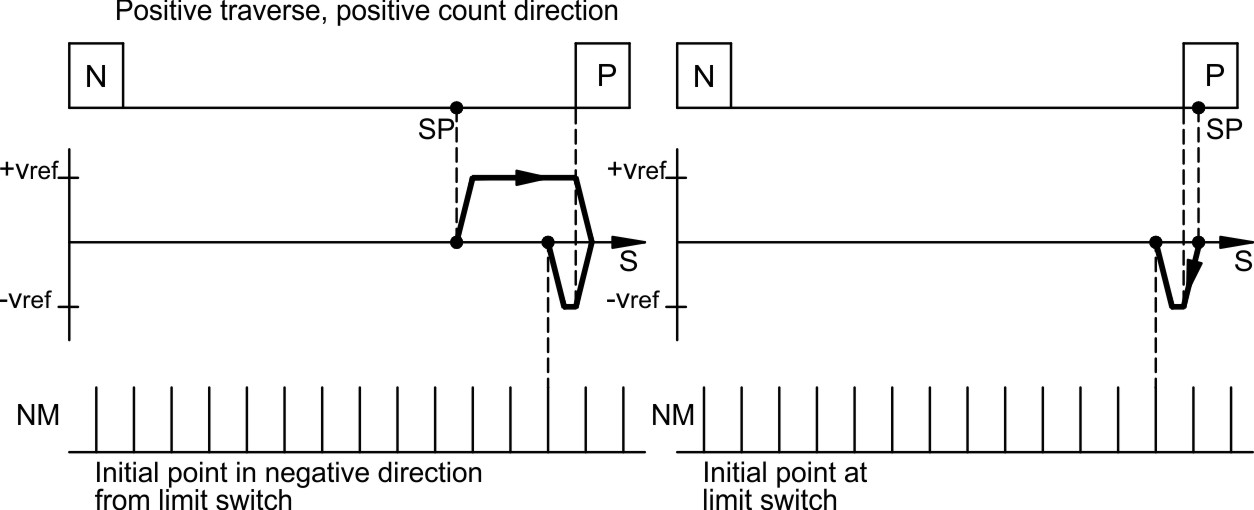
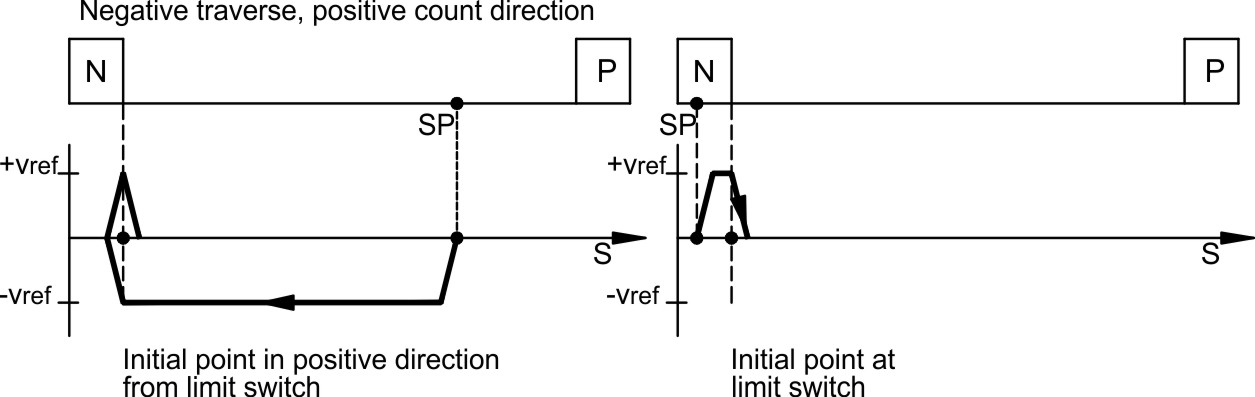
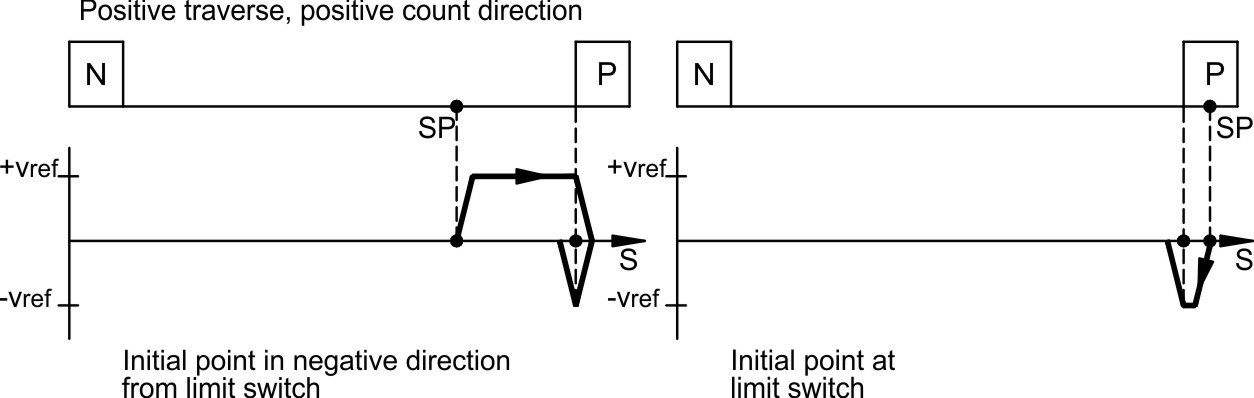
Homing with limit switches, without homing switch, with feedback zero
|
|
Before starting homing, check the safety of the system since the load may move even if the limit-switches are disconnected or defective. |
Homing with limit switches, with homing switch, without feedback zero
Homing with limit switches, without homing switch, without feedback zero
|
|
Behavior for successively repeated starts of Homing 5:
|
Homing with limit switches, without homing switch, with feedback zero
|
|
|
Sets the reference point to the actual position (the following error is not lost). The load does not move.
|
|
Using this type of homing can damage the mechanical stop on the machine. The peak current, Ipeak, and the continuous current, Irms, are limited for the duration of the homing run. A more severe limiting of the current is possible. (see parameter Homing Ipeak on screen page Current Loop). |
Homing to echanical stop, without limit switches, without homing switch, with feedback zero
|
|
|
Prerequisite: an absolute encoder (SSI) is connected to to the encoder input X1 of the servo amplifier. When the homing starts, the absolute position is read at connector X1. The reference point is set to this position. The load does not move.
|
|
Using this type of homing can damage the mechanical stop on the machine. The peak current, Ipeak, and the continuous current, Irms, are limited for the duration of the homing run. A more severe limiting of the current is possible. (see parameter Homing Ipeak on screen page Current Loop). |
Homing to mechanical stop, without limit switches, without homing switch, without feedback zero
|
|
|
Legend
|
N |
Limit switch NSTOP |
P |
Limit switch PSTOP |
SP |
Start position |
|
R |
Homing switch |
vref |
velocity setpoint |
NM |
feedback zero mark |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|