| Feedback |
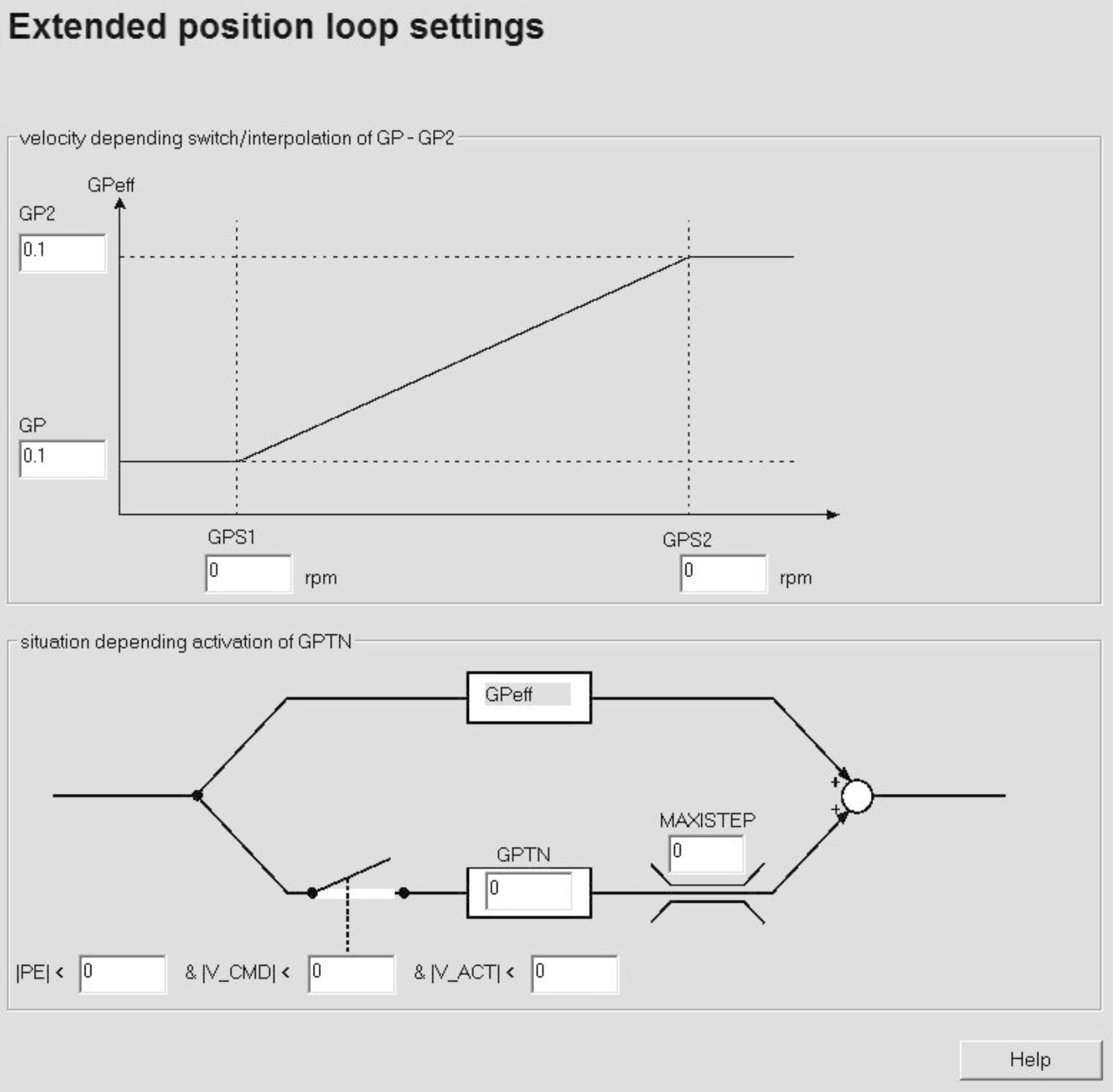
Set speed-dependent position control in the upper diagram. The amplification factor changes according to the speed.
The lower diagram allows you to connect an integral component for position control, dependent upon tracking errors and speed.
|
Screen text |
ASCII Parameter |
|---|---|
|
GP2 |
GP2, proportional gain 2, position loop |
|
GP |
GP, proportional gain, position loop |
|
GPS1 |
GPS1, lower velocity limit |
|
GPS2 |
GPS2, upper velocity limit |
|
GPeff |
rms value of proportional gain GP |
|
GPTN |
GPTN, integral gain, position loop |
|
MAXISETP |
MAXISETP, maximum current value |
|
PE |
PE, following error |
|
V_CMD |
VCMD, with OPMODEs 0, 1, 4, 5, 6, 7, 8 = Velocity set point, with OPMODEs 2, 3 = Actual Velocity |
|
V_ACT |
V, Actual Velocity |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|
