| Feedback |
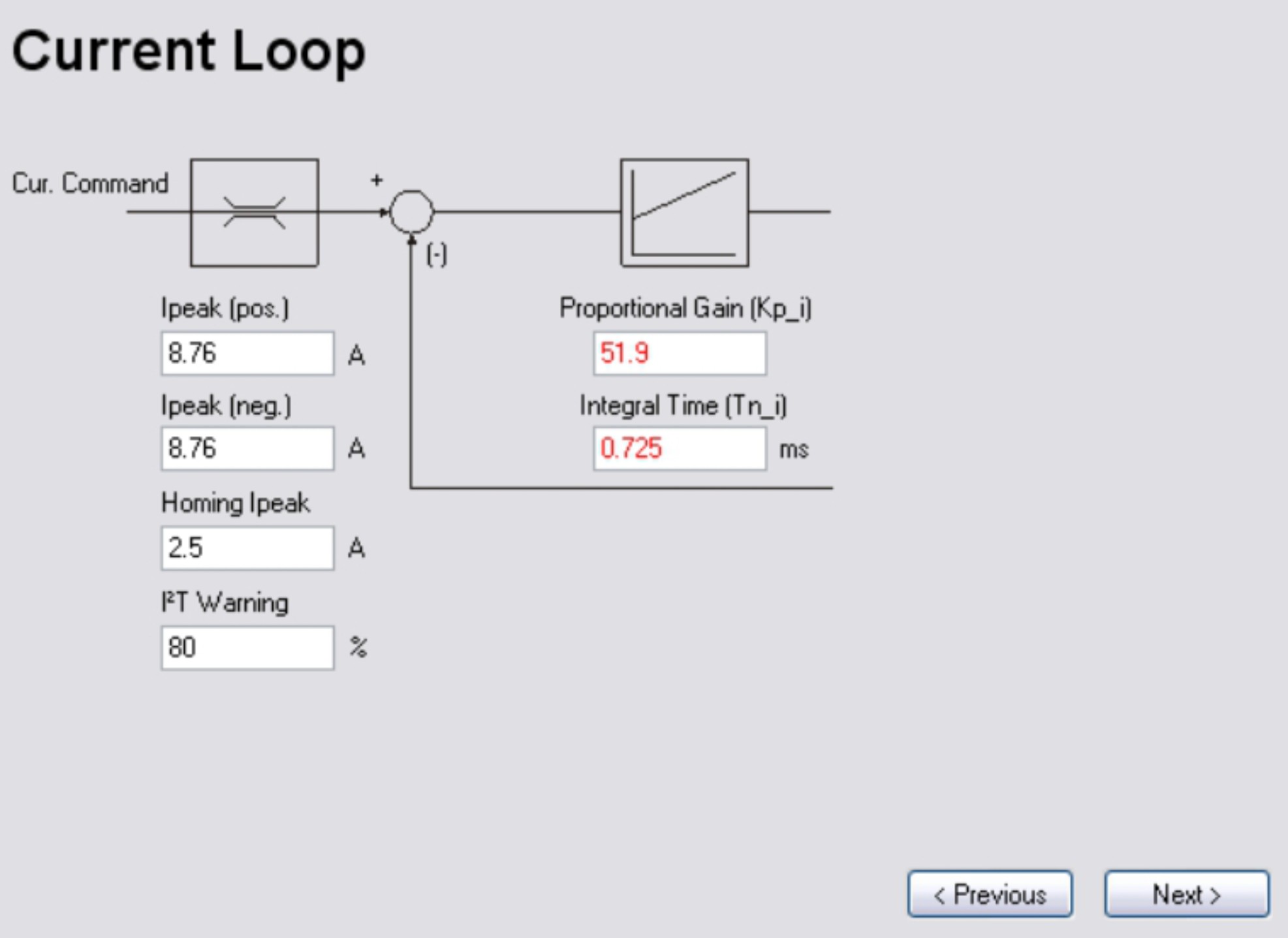
Parameters for tuning the current loop. Usually changes are not necessary, if the motor dataset is correct.
|
Screen text |
ASCII Parameter |
|---|---|
|
Ipeak (pos.) |
|
|
Ipeak (neg.) |
|
|
Homing Ipeak |
|
|
I²t Warning |
|
|
Proportional Gain (Kp_i) |
|
|
Integral Time (Tn_i) |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|
