| Feedback |
Wake and Shake is used for feedback systems without commutation signals, such as a Hall sensor or a SinCos encoder. Experts can make settings for the Wake and Shake procedure on this screen.

|
Settings with significant errors may lead to motor overspeed. Risk of injury. The parameters should only be changed after consulting a service technician. |
|
Screen text |
ASCII Parameter |
|---|---|
|
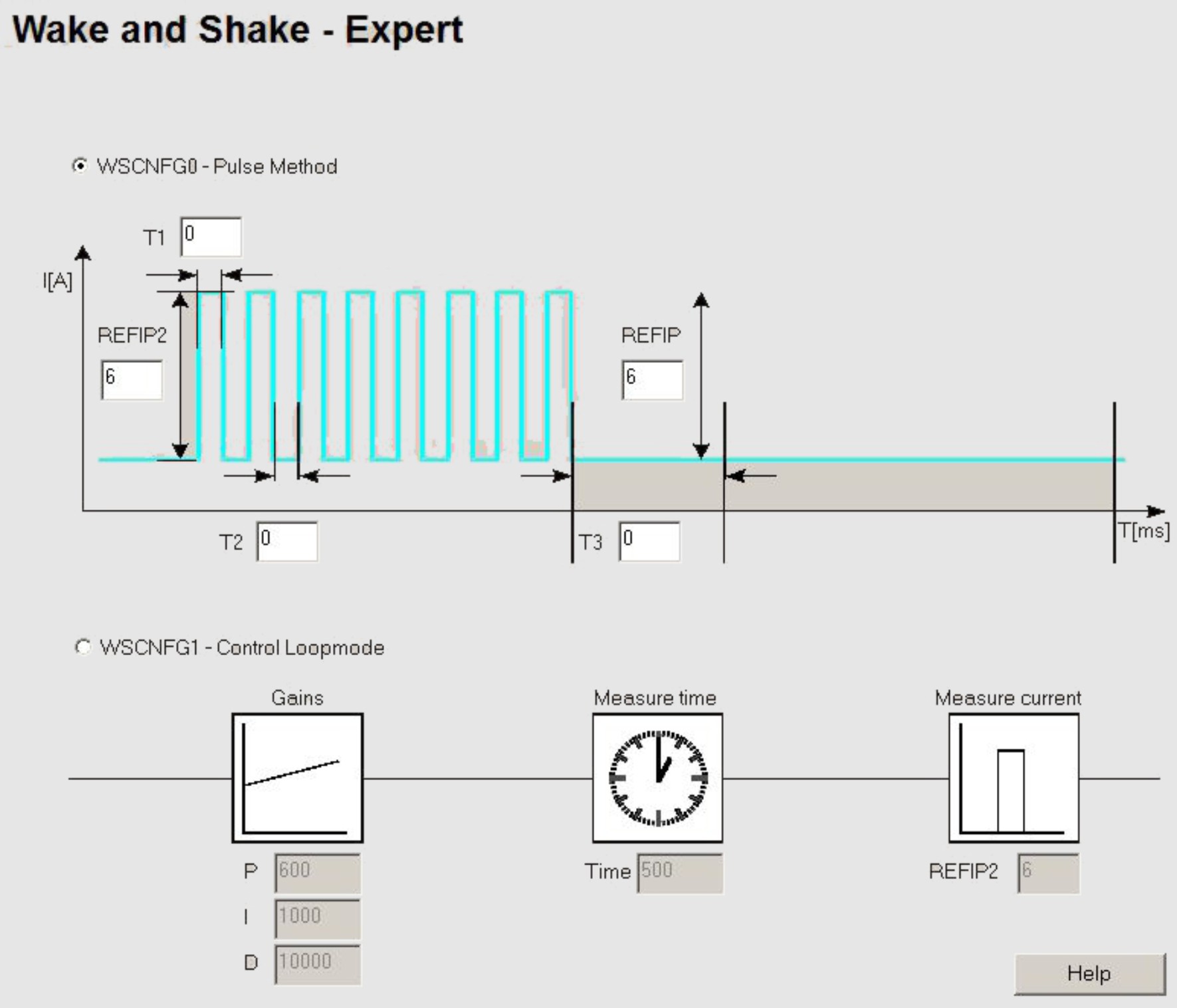
WSCNFG0 - Pulse Method |
|
|
T1 |
WSTIME, unction execution time |
|
REFIP2 |
REFIP2, peak current for commutation location |
|
REFIP |
REFIP, peak current |
|
T2 |
WSTIME2, pause time between the current vectors |
|
T3 |
WSTIME3, time interval between coarse and fine tuning |
|
WSCNFG1 - Control Loop Method |
|
|
P |
MPKP, P component of the position controller |
|
I |
MPKI, I component of the position controller |
|
D |
MPKD, D component of the position controller |
|
Time |
MPTIME, alignment time for commutation location |
|
REFIP2 |
REFIP2, peak current for commutation location |
|
Help |
Opens the KDN page Wake and Shake. |
|
Stay Connected with Kollmorgen       
|
Copyright © 2020 |
|

